
REVIEW – As a household of two adults, two young kids, a dog and a cat… it is a war of attrition to keep our home clean. I’ve been intrigued by the idea of a robot vacuum that can also mop, but skeptical of how the mopping feature could be anything more than a gimmick. The EVA by ROIDMI offers an interesting take on the mopping functionality, and the results were surprising.
What is it?
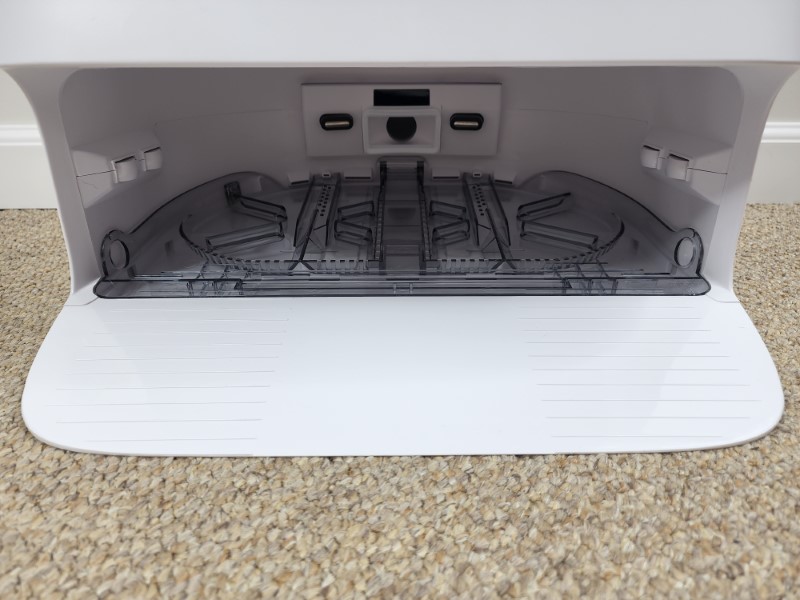
The ROIDMI EVA is a feature packed robot vacuum that is designed to be an automated, self-maintaining, all-in-one floor cleaning solution. The EVA docks in a base station that empties the dustbin, and when in mopping mode, will clean and dry the mop pads.
Supported by an Android/iOS application, the ROIDMI EVA offers smart mapping options with no-go lines, forbidden areas, room or area cleaning, floor plans and more… just about everything you’d expect from a high end robot vacuum.
Established in 2015 and based out of China, ROIDMI has been producing traditional and robot vacuums since 2016. The EVA is their newest robot vacuum following the EVE Plus.



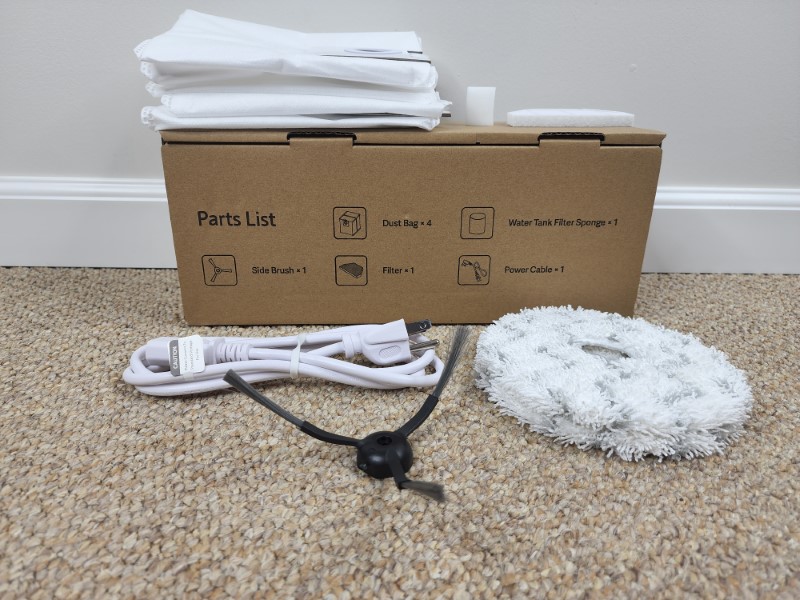
What’s in the box?
- ROIDMI EVA robot vacuum
- Base station
- Mop pads (4)
- Dust bags (4)
- Extra dustbin filter (1)
- Extra water tank filter (1)

Specifications
Robot Vacuum
- Rated Power: 48W
- Battery Capacity: 5200mAh
- Charging Time: 4h
- Run-time: 120mins
- Cleaning map area: 180m2
- Max Obstacle Height (e.g. floor thresholds): 20/15mm
- Voice Command: Alexa & Google
- Weight: 4.2kg
Base Station
- Rated Power:850W
- Dust Bag Capacity: 60 days
- Water Tank Capacity: 4L
- Weight:9.8kg
Consumables and recommended replacement interval
- Dustbin Filter – 150 hours
- Side brush – 200 hours
- Middle brush – 300 hours
- Mop pads – 150 hours
Official parts can be purchased from https://roidmi.com/collections/accessories
Design and features
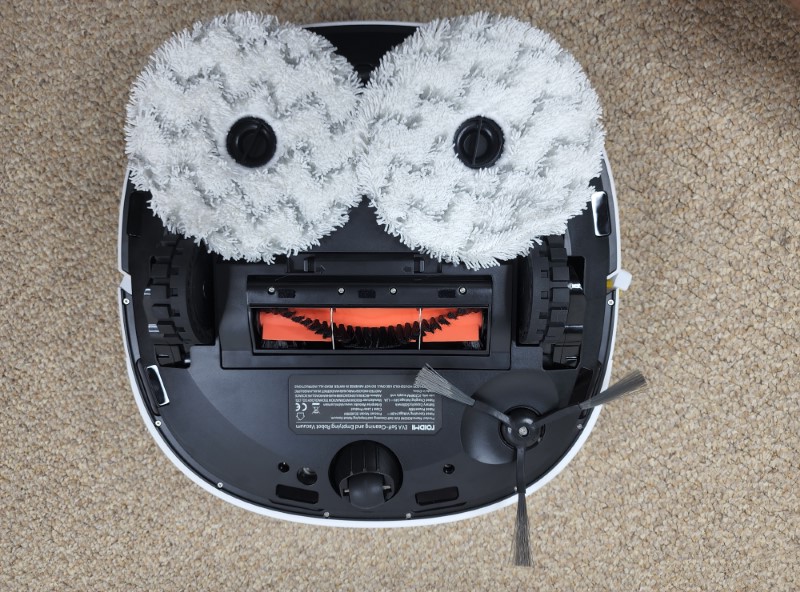
The ROIDMI EVA robot vacuum/mop has a familiar round body design with a side sweep brush. One of the standout features of the ROIDMI EVA is the mopping implementation. The mopping action is achieved by two 4″ mop pads spinning at 180 RPM with 12N of downforce in order to effectively agitate the surface for an effective cleaning.

Other features include:
- Self-emptying dustbin
- Self-cleaning, and self-drying mop system
- 3 cleaning modes – mop, sweep, or mop and sweep
- 4 suction modes – quiet, standard, power and max
- Carpet detection – increases suction power when cleaning on carpeted floors
- LiDAR SLAM mapping
Performance
I feel it is important to provide some context on how we use a robot vacuum in our house, and what my expectations are of one. We rely on the EVA to ‘keep up’ throughout the week, and usually, on the weekend we’ll spend some time doing a detail or deep clean on the areas that need it. I haven’t found any robot vacuum design that can negate the need to manually clean the corners or get underneath the baseboard heaters. The same holds true for the EVA. It helps us keep the house generally clean throughout the week with minimal effort, and does help reduce the time it takes to work through our cleaning routine each weekend… but it doesn’t fully replace the need for a manual vacuum and mop.

Setup and Mapping
Getting started with the ROIDMI EVA robot vacuum was straightforward and without much fuss. I can tell almost immediately with the app that it’s going to be a bit quirky – some localization (Chinese to English translations) is a bit off, and some UX choices seem odd. While the app has some localization problems, the voice feedback from the robot itself is quite good. Instructions and notifications from the robot ‘talking’ can sometimes be more helpful than the notification from within the app itself. While the app experience isn’t as bad as some, I found my experience with the Neato app to be far smoother, albeit, with far fewer features than their Botvac D6.
The first run for the EVA is when it generates the floor map. This was pretty accurate on the first try, and once the map is established you can set up your no-go zones, virtual walls, room names, etc in the app. The app does an OK job at identifying one room from the other, but some work was needed to properly set room boundaries. It’s important to set the room boundaries in order to have good cleaning coverage in the “Partition” mode, should you ever want to clean just one room or several instead of the entire floor plan.

Cleaning Performance
The EVA does a great job as a vacuum, and this is the mode we run it in most often. The long reach of the sweep arm does well along edges, though corners remain elusive. When the vacuum enters a room it will run along the perimeter, then run in straight lines through the rest.
Object detection is pretty standard. It usually does a good job at avoiding larger things on the floor, but it will still get tripped up by low laying items such as power cords. I’ve also observed it run full speed into a table leg, and the dog. This is all very much in line with our experience with other robot vacuums – while object detection technology is generally good enough, we’re still a long way from trusting these devices to properly avoid everything.
One criticism I have of the ROIDMI EVA robot vacuum is the size of the dustbin. When I initially saw how small it was, I assumed it would be a non-issue… the EVA can self empty, so surely it must know when the dustbin is getting full. Unfortunately, this is not the case. In my early testing, if I let the EVA vacuum our entire first floor, the dustbin would get so jam packed that it couldn’t empty in the base station. There is also no way to add a step in the cleaning process to tell it when to empty the dustbin on its own. We have one fully carpeted room, the kid’s playroom, so my solution to this has been to run the vacuum in partition mode and skip that room. This room usually requires some extra prep work to get ready for vacuuming anyway, so after the EVA has cleaned everywhere else and emptied the bin, we’ll task it with the playroom.

As a mop, the ROIDMI EVA is impressive. The implementation of the spinning mop pads with the applied downward force really works. There is no water tank in the robot, so it will periodically head back to the base station to have the mop pads refreshed as it cleans.
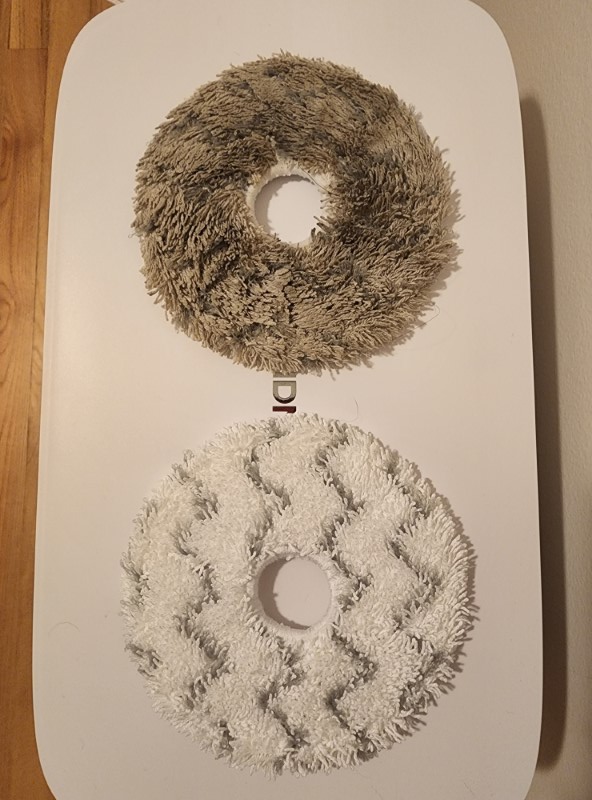
It’s not perfect, and it struggles with anything stuck on the floor, but by and large, I am quite pleased with how it runs. The waste water tank from the cleaning process is proof enough of its effectiveness, and the floors dry quickly after being cleaned.

While in mopping mode, the ROIDMI EVA also does well at avoiding carpets. It’s fun to watch it approach an area rug and go just far enough over it that the mop pads stop just shy of coming in contact with it. This technique does pose a potential for problems though, as the robot can then back up into something and dislodge the mop pads. This happened with regularity in our office – the EVA would back into the desk legs while cleaning around an area rug. More on fault tolerance and recovery later, but when this happens the entire mopping run needs to start over.

One area that the mopping feature stands to be improved on is the automated mop pad cleaning process. At the end of a mopping job, the base station will clean the pads and then start a fan-assisted drying process. From the app, you can set the drying process to run for up to 12 hours. However, even at 12 hours, or even days beyond that, I’ve never found the pads to get dry on their own. The effectiveness of the pad cleaning process is also questionable, as the pads themselves are still pretty dirty. At this point, we just throw the mop pads into the washer and dryer after the EVA completes a mopping run.
Lastly, the fault tolerance of the ROIDMI EVA still needs work. Anytime the robot had an issue that required it to stop, I couldn’t figure out how to get it to resume from where it was and needed to start it over from the beginning. This was incredibly frustrating early on as I was getting a feel for how the EVA works. Over time I’ve been able to fine tune the map to keep it out of known trouble areas and optimize its cleaning process.
In the time I’ve been reviewing the vacuum, both it and the base station have received updates – a good sign of support. Most of my gripes with the ROIDMI EVA are all, I would suspect, resolvable with future firmware or app updates.
What I like
- Cleaning effectiveness is quite good, and mopping implementation is more than just a gimmick.
- Solid hardware.
- Accurate mapping and cleaning paths.
What I’d change
- Ability to add an automatic dustbin empty step to the cleaning sequence. You can trigger this manually, but that defeats the purpose of automation. Being able to build a custom cleaning routine with defined dustbin steps would fully realize the self-emptying feature.
- Robot needs better fault tolerance to continue a cleaning run after an issue is resolved.
- Improvements to localization with the app.
- Mop pad drying and cleaning process isn’t very effective.
Final thoughts
I went into this review with guarded optimism – on paper the ROIDMI EVA robot vacuum looked to tick all the boxes, but I still had some doubts. Over the past month of working with the EVA, it has proven to be up to the task. It is not without its quirks though, and there is definitely some effort required in optimizing it’s capabilities. With some trial and error, we are at a point where it’s generally set it and forget it. ROIDMI does not appear to still be selling the EVE Plus, however, parts are still available through their website for it which brings me some confidence that the EVA will continue to be supported in the future. The EVA has earned a spot in our home, along with the name, Rocinante.
Price: $899.00
Where to buy: ROIDMI or Amazon
Source: The sample for this review was provided by ROIDMI.

Google Review Tap Cards (3-Pack) by TapFive - Tap for Instant Reviews - All Phones Compatible - Reusable Smart Tap NFC & QR - Boost Business Reviews - Powered by TapFive (3 Card Pack)
(as of July 5, 2026 00:35 GMT -05:00 - More infoProduct prices and availability are accurate as of the date/time indicated and are subject to change. Any price and availability information displayed on [relevant Amazon Site(s), as applicable] at the time of purchase will apply to the purchase of this product.)
Gadgeteer Comment Policy - Please read before commenting
Hi I bought this for a friend who was getting a new house. She was delayed a few months getting in her home so this gift/vacuum was just recently opened.
She only received the vacuum without a plug, charger, home base, etc. I’d like to buy her the missing part(s) but not sure where I am but it. Can you help me?